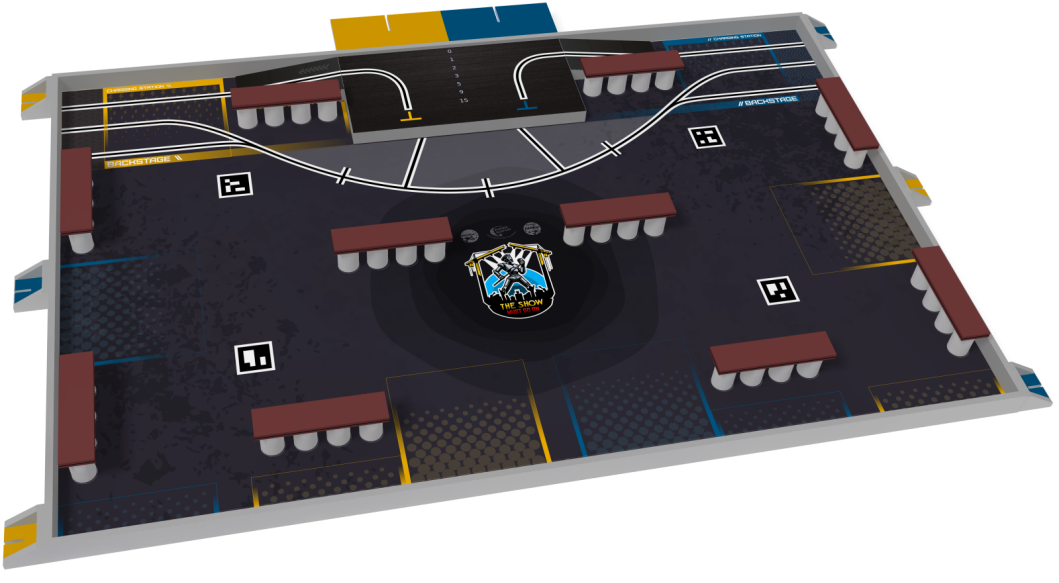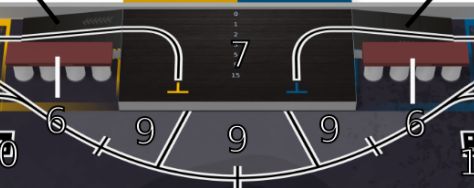
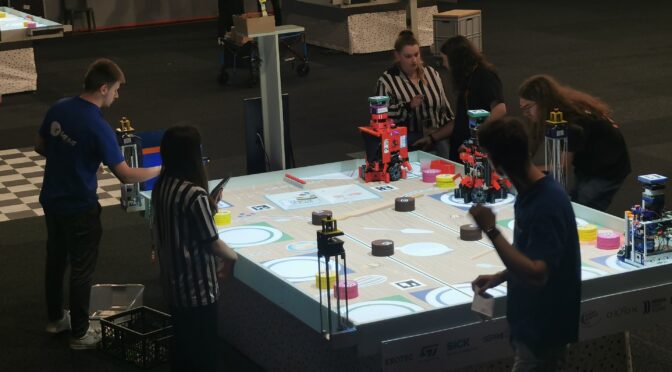

Du interessierst dich für Technik und möchtest mal herausfinden, wie ein Ingenieur denkt? Am 3. und 4. Mai kannst du in die Welt der Robotik eintauchen! Neben coolen Projekten von unserer Universität, wie zum Beispiel Roboterhunden, kannst du beim nationalen Eurobot-Wettbewerb zuschauen. Hierbei treten Teams aus ganz Deutschland mit ihren Robotern gegeneinander an und versuchen so schnell wie möglich verschiedene Aufgaben auszuführen.
Nur zuschauen ist jedoch langweilig! Am 3. Mai kannst du selbst aktiv werden und deinen eigenen Roboter im Rahmen der ScrapBot-Challenge bauen.
Und keine Angst: Du benötigst keine Vorerfahrungen oder besonderes technisches Wissen – du erlernst alles was du benötigst spielerisch vor Ort.
Was ist die ScrapBotChallenge?
Bei der ScrapBot-Challenge könnt Ihr und euer Team selbst kreativ werden und aus Pappe, Heißkleber, zwei Motoren und was euch sonst noch einfällt einen eigenen Roboter bauen. Dieser wird im Anschluss in einer Challenge gegen die anderen Teams antreten. Die Challenge verraten wir euch jedoch erst vor Ort, damit niemand einen Vorteil hat.
Wie funktioniert die Challenge?
- Melde dich entweder einzeln oder in einem Team an. Bei einer Einzelanmeldung werden wir dir vor Ort deine Teamkameraden vorstellen
- Von 10:00 Uhr bis 13:00 Uhr könnt ihr alle Materialien vor Ort nutzen, um euren ScrapBot zu bauen. Ihr könnt jederzeit eine Mittagspause einlegen und euch stärken.
- Tretet in einer Challenge gegen die anderen Teams an und kämpft euch zum ScrapBot-Meister hoch!
Um Verpflegung vor Ort sowie Bastelmaterialien kümmern wir uns! Ihr könnt jedoch gerne kleine Figuren o.ä. mitbringen, um euren Roboter zu verschönern.
Für jeden Teilnehmer wird es am Ende eine Teilnahmeurkunde sowie einen kleinen Goodiebag geben! Außerdem dürft ihr eure Roboter als Andenken auch mit nach Hause nehmen.
Wie läuft das Robotik Wochenende ab?
3. Mai:
Von 11:00 Uhr bis 18:00 Uhr könnt ihr den Eurobot-Teams bei den Vorrunden zuschauen, bei denen die Roboter erstmals gegeneinander antreten.
Von 10:00 Uhr bis 15:00 Uhr findet parallel die ScrapBot-Challenge statt – inklusive großem Finale und Siegerehrung im Anschluss!
Von 10:00 Uhr bis 18:00 Uhr könnt ihr einige Robotik-Projekte unserer Fakultät bewundern und euch im ASCII-Cafe im Gebäude Getränke und kleine Stärkungen holen.
Für eine Mittagsverpflegung sorgen wir zwischen 11:30 Uhr und 13:30 Uhr.
4. Mai:
15:00 Uhr bis 16:30 Uhr könnt ihr beim Finale des deutschen Eurobots zuschauen! Hierbei kämpfen die Teams um die Qualifikation für den internationalen Eurobot Wettbewerb.
Anmeldung:
Bitte melde dich unter einem der folgenden Links an. Jedes Team besteht aus drei Personen:
Fülle in der E-Mail Vorlage die entsprechenden Felder aus und hänge bitte die folgende Einwilligung unterschrieben an.
Wir melden uns anschließend bei dir.
Wir freuen uns schon auf dich!
Sollten die Anmeldelinks mit der E-Mail-Vorlage nicht funktionieren, schreibt bitte eine Mail an scrapbot@turag.de